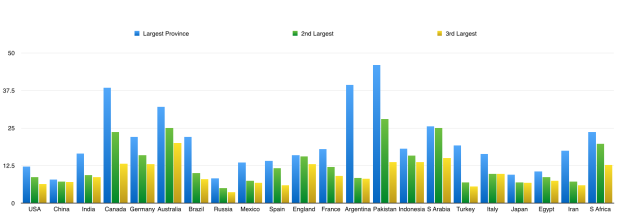
The graph above shows the size of countries’ largest provinces or states in relation to their overall populations. So California, for example, is home to approximately 12 percent of the total population of the United States, whereas Ontario is home to 39 percent of Canada’s population and Punjab to 47 percent of Pakistan’s.

The biggest standout here, though, is Argentina’s largest province Buenos Aires, which is by far the most populous of Argentina’s 24 provinces. In fact, the population of the province of Buenos Aires does not even include that of the “Autonomous City” of Buenos Aires – see map above – which is itself the fourth most populous province in the country. In Argentina’s presidential elections this past October, the two candidates were the leaders of the province of Buenos Aires and the Autonomous City of Buenos Aires, respectively.
Below is a graph, made using data taken from Wikipedia, which shows the GDP sizes of the biggest provincial/state economies around the world, in nominal terms. It is led by California, which is thought to have an economic output of nearly $2.3 trillion these days, larger than all but seven of the world’s countries. Given the nature of this information, though, this graph should probably be taken with a decent-sized grain of salt.
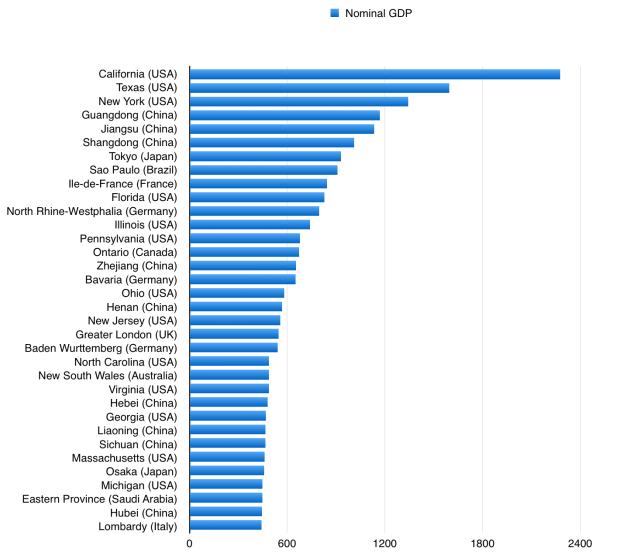
13 of the 34 provinces/states in the graph above are in the USA, 9 are in China, and 13 are in other countries. Germany and Japan both have 2, but they are the only countries apart from the US or China to have more than 1 province on this graph.
No Indian states made it on to the graph above. On the graph below, however, which shows the 34 most populous provinces/states in the world, 11 are from India, whereas California, the most populous US state, is ranked 33rd. 17 out of 34 on the graph below are Chinese, and 6 are neither Chinese nor Indian. This graph also shows the territory size of each province.

Note the dominance of India’s province Uttar Pradesh. In fact, India’s five most populous states – Uttar Pradesh, Maharashtra, Bihar, West Bengal, and Madhya Pradesh (combined population: approximately 580 million) – border one another in a direct line, and Uttar Pradesh also directly borders India’s seventh most populous state, Rajasthan, as well as India’s most densely populated state, Delhi (India’s capital). In China and the US, in contrast, some of the largest states, notably California, Texas, Florida and Illinois in the US and Guangdong and Sichuan in China, do not border any of the other most populous states within their own country.

In Germany, meanwhile, the fifth most populous state in the country, Hesse, directly borders all four of the most populous German states: North Rhine-Westphalia, Bavaria, Baden-Wurttemburg, and Lower Saxony. Hesse’s chief city is Frankfurt, a European finance and transport hub.

Finally, in Brazil, the three most populous states, namely Sao Paulo (which is by far the largest), Minas Gerais, and Rio de Janeiro, directly border one another. Sao Paolo also borders the sixth largest state, Parana, while Minas Gerais also borders the fourth largest state, Bahia. The four largest Brazilian states are home to 48 percent of Brazil’s overall population.


2 Comments